16.含参积分
含参变量积分的连续性定理
1. 核心问题与动机
在微积分中,我们经常遇到形式为 $h(y) = \int_{a}^{b} f(x, y) , dx$的函数。一个非常自然的疑问是:如果被积函数$f(x, y)$是连续的,那么积分出来的函数$h(y)$ 是否也是连续的?
如果 $h(y)$连续,意味着对于任意的$y_0$,都有 $\lim_{y \to y_0} h(y) = h(y_0)$。将 $h(y)$ 的定义代入,这个等式实际上就是:
$$ \lim_{y \to y_0} \int_{a}^{b} f(x, y) \, dx = \int_{a}^{b} \left( \lim_{y \to y_0} f(x, y) \right) \, dx $$
这便是极限号($\lim$)与积分号($\int$)的交换问题。为了确保这种交换的合法性,我们需要严格的数学证明。
2. 定理陈述
定理:设函数 $f(x, y)$在闭矩形区域$R = [a, b] \times [c, d]$ 上连续(Continuous),则由积分定义的新函数
$$ h(y) = \int_{a}^{b} f(x, y) \, dx $$
在区间 $[c, d]$上也是连续的,即$h(y) \in C[c, d]$。
3. 证明思路与严格推导
动机:要证明 $h(y)$在$y_0$处连续,我们需要控制当$y$靠近$y_0$时,两者积分值的差值$|h(y) - h(y_0)|$能够任意小。由于积分区间是固定的,如果我们能让被积函数的差值$|f(x, y) - f(x, y_0)|$ 整体缩小,就能通过积分把误差控制住。
这里遇到的障碍是,$x$是在$[a, b]$上变动的。幸运的是,二元连续函数在紧集(闭矩形)上具有一致连续性(Uniform Continuity),这意味着误差的控制可以做到“与$x$ 的具体取值无关”。
严密推导步骤:
引入一致连续性:因为 $f(x, y)$在闭矩形$[a, b] \times [c, d]$ 上连续,由康托尔定理(Cantor’s Theorem),它必在整个区域上一致连续。
定量刻画误差:由一致连续性的定义,对任意给定的 $\varepsilon > 0$,必然存在一个只与 $\varepsilon$有关的$\delta > 0$,使得当两个点 $(x_1, y_1)$和$(x_2, y_2)$的距离小于$\delta$时,它们的函数值之差小于$\varepsilon$。
即:当 $|(x_1, y_1) - (x_2, y_2)| < \delta$时,有$|f(x_1, y_1) - f(x_2, y_2)| < \varepsilon$。
特化到参数 $y$:我们保持 $x$坐标相同,仅让$y$逼近$y_0$。对于任意的 $y \in [c, d]$,只要 $|y - y_0| < \delta$,那么对区间 $[a, b]$上的所有$x$,都有:
$$ |f(x, y) - f(x, y_0)| < \varepsilon $$
- 放大积分值的差:利用积分的线性性质和绝对值不等式,我们来估计目标差值:
$$ |h(y) - h(y_0)| = \left| \int_{a}^{b} f(x, y) \, dx - \int_{a}^{b} f(x, y_0) \, dx \right| $$
$$ \le \int_{a}^{b} |f(x, y) - f(x, y_0)| \, dx $$
- 最终控制:将步骤 3 的一致连续性估计代入上式:
$$ \le \int_{a}^{b} \varepsilon \, dx = \varepsilon (b - a) $$
由于 $b - a$是一个常数,当$\varepsilon \to 0$ 时,$\varepsilon(b-a) \to 0$。
这完成了证明,说明在整体连续的条件下,极限号与积分号的交换是安全的:
$$ \lim_{y \to y_0} \int_{a}^{b} f(x, y) \, dx = \int_{a}^{b} \left( \lim_{y \to y_0} f(x, y) \right) \, dx $$
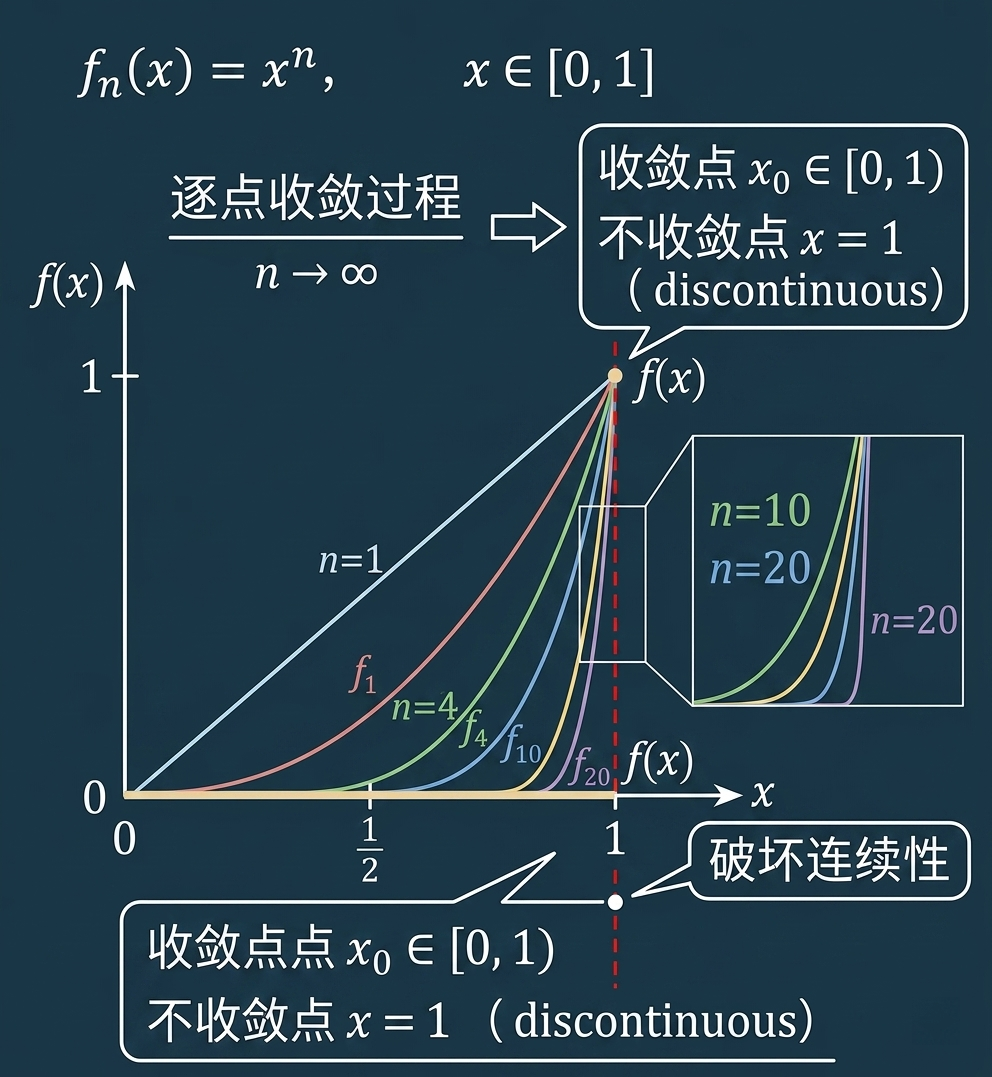
经典反例——当连续性条件退化时
1. 动机
数学的严谨性不仅体现在“什么时候可以交换”,更体现在“为什么不满足条件就不能交换”。上面的定理要求 $f(x, y)$在包含极限点在内的闭区域上连续。如果参数$y$的极限点(比如$y \to 0$)会导致函数在某个局部失去连续性,那么极限号和积分号还敢轻易交换吗?
下面这个反例,正是为了展示盲目交换符号所带来的灾难。
2. 反例的构造
考虑定义在 $x \in [0, 1]$且$y > 0$(逐步逼近 $0$)的含参变量积分:
$$ h(y) = \int_{0}^{1} \frac{x}{y^2} e^{-\frac{x^2}{y^2}} \, dx $$
我们的目标是考察当 $y \to 0$ 时,这个函数的行为。
3. 两种路径的碰撞(推导与对比)
我们要对比两个完全不同的运算顺序:
路径 A(先求极限,后积分):假设我们可以把极限塞进积分号内部。
路径 B(先完成积分,后求极限):严格按照数学定义,先算出 $h(y)$ 的解析式,再看它的极限。
路径 A:先求极限
步骤:我们先不看积分,单独考察被积函数 $f(x, y) = \frac{x}{y^2} e^{-\frac{x^2}{y^2}}$当$y \to 0$ 时的逐点极限。
当 $x > 0$时:令$t = \frac{x^2}{y^2}$。当 $y \to 0$ 时,$t \to +\infty$。
原式可以看作 $\frac{1}{x} \cdot t e^{-t}$。根据洛必达法则(L’Hôpital’s rule),指数爆炸增长的速度远快于线性增长,因此 $\lim_{t \to +\infty} t e^{-t} = 0$。
当 $x = 0$时:分子直接为$0$,所以函数值恒为 $0$,极限自然也是 $0$。
结论:在 $x \in [0,1]$的每一个点上,函数的极限都是$0$:
$$ \lim_{y \to 0} f(x, y) = 0 $$
如果我们盲目交换符号,就会得到:
$$ \text{错误猜测} = \int_{0}^{1} \left( \lim_{y \to 0} f(x, y) \right) \, dx = \int_{0}^{1} 0 \, dx = \mathbf{0} $$
路径 B:先求积分(真实的 $h(y)$)
步骤:我们老老实实先计算这个定积分。注意到被积函数的结构非常凑巧,极其适合使用换元法(Substitution Rule)。
观察到:$d\left(-\frac{x^2}{y^2}\right) = -\frac{2x}{y^2} , dx$,这意味着 $\frac{x}{y^2} , dx = -\frac{1}{2} d\left(-\frac{x^2}{y^2}\right)$。
我们直接进行不定积分的配凑:
$$ \int \frac{x}{y^2} e^{-\frac{x^2}{y^2}} \, dx = -\frac{1}{2} \int e^{-\frac{x^2}{y^2}} \, d\left(-\frac{x^2}{y^2}\right) = -\frac{1}{2} e^{-\frac{x^2}{y^2}} $$
现在带入上下限 $[0, 1]$:
$$ h(y) = \left[ -\frac{1}{2} e^{-\frac{x^2}{y^2}} \right]_{x=0}^{x=1} = \left( -\frac{1}{2} e^{-\frac{1}{y^2}} \right) - \left( -\frac{1}{2} e^{0} \right) $$
$$ h(y) = \frac{1}{2} \left( 1 - e^{-\frac{1}{y^2}} \right) $$
现在,我们对积分出来的真实 $h(y)$求$y \to 0$ 的极限:
当 $y \to 0$ 时,$\frac{1}{y^2} \to +\infty$,因此 $-\frac{1}{y^2} \to -\infty$,导致 $e^{-\frac{1}{y^2}} \to 0$。
$$ \lim_{y \to 0} h(y) = \frac{1}{2} (1 - 0) = \mathbf{\frac{1}{2}} $$
4. 结论与批判性总结
我们将两者的结果放在一起对比:
先求极限再积分(路径 A):$0$
先积分再求极限(路径 B,真实值):$\frac{1}{2}$
关键结论:$0 \neq \frac{1}{2}$,极限号与积分号在这里不能交换。
为什么会这样?(本质剖析)
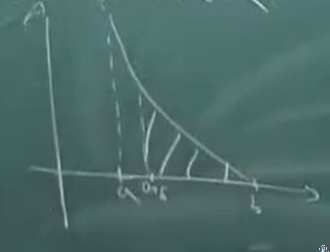
如果我们画出 $f(x, y)$随着$y$变小时的函数图像,会发现一个现象:虽然在每一个固定的$x > 0$处,函数值最终都会塌陷到$0$;但在靠近 $x=0$的右侧,函数会鼓起一个巨大的“峰值”。随着$y$越接近$0$,这个山峰会变得越窄、越高。
尽管山峰越来越窄,但它下面所包裹的面积却始终顽固地趋近于 $\frac{1}{2}$。这种由于局部行为剧烈异动导致整体积分不趋于 $0$ 的现象,在高等数学中被称为非一致收敛(Non-uniform Convergence)。它精确地证明了:没有一整块闭区域上的连续性(或一致收敛性)做担保,微积分的符号交换就会失效。
顺序交换(累次积分)
对一个定义在矩形区域 $R = [a, b] \times [c, d]$上的连续函数$f(x, y)$,我们先对 $x$积分再对$y$积分,与先对$y$积分再对$x$ 积分,结果是否等价?
1. 概念引入与定义
设 $f(x, y) \in C([a, b] \times [c, d])$,即 $f$在该闭矩形上连续。我们定义一个一元函数$h(y)$,它通过对 $x$施加积分来消去$x$ 变元:
$$ h(y) = \int_{a}^{b} f(x, y) \, dx $$
2. 核心定理(积分交换律)
若 $f(x, y)$连续,则$h(y)$在$[c, d]$ 上同样连续,且满足:
$$ \int_{c}^{d} h(y) \, dy = \int_{c}^{d} \left( \int_{a}^{b} f(x, y) \, dx \right) dy = \int_{a}^{b} \left( \int_{c}^{d} f(x, y) \, dy \right) dx $$
3. 构造动机与直观理解
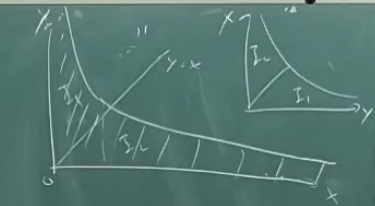
把二维平面画成一个精细的网格,计算黎曼和 $\sum_{i=1}^n \sum_{j=1}^m f(x_i, y_j) \Delta x_i \Delta y_j$。这个矩阵式的网格图形暴露了积分交换的本质。
当我们面对一个三维空间中的曲顶柱体体积时,积分其实就是一种“切片求和”的艺术。
先 $x$后$y$:意味着我们先沿着与 $x$轴平行的方向,把矩形区域切成一条条细长的“栅栏”,算出每条栅栏下的截面积$h(y)$,随后再把这些截面积沿着 $y$ 轴的走向累加起来。
先 $y$后$x$:则是把切片的方向旋转了90度,先算出平行于 $y$轴的截面积,再沿着$x$ 轴累加。
因为网格是有限的,无论是先加行还是先加列,小方柱的总和显然相等。当网格无限细分趋向于微分时,这种离散的交换就自然地流淌成了连续积分符号的交换。置信度评级:高。因为连续性保证了黎曼和的极限唯一性。
微分与积分符号的交换
含参变量积分的实用工具——如何对一个积分结构进行求导。
核心定理(Leibniz积分法则)
设 $f(x, y) \in C([a, b] \times [c, d])$,并且其关于参变量 $y$的偏导数$f_y(x, y)$ 在该区域内同样连续。
若定义 $h(y) = \int_{a}^{b} f(x, y) , dx$,则 $h(y)$ 可导,且其导数可以直接穿透到积分号内部:
$$ h'(y) = \frac{\partial}{\partial y} \left( \int_{a}^{b} f(x, y) \, dx \right) = \int_{a}^{b} \frac{\partial}{\partial y} f(x, y) \, dx $$
构造动机:为什么要这么做?
在传统的微积分中,导数(微观的变化率)和积分(宏观的累加)是一对互逆的算子。但当导数作用于“参变量” $y$,而积分作用于“积分变量” $x$ 时,这两个算子由于作用在不同的维度上,彼此之间产生了一种平行关系。
我们希望知道,当整个大环境(参变量 $y$)发生微小扰动时,积分所代表的总体量是如何随之变化的。如果能将求导符号“扔进”积分号内部,我们就可以先观察每一个微小局部随 $y$ 的变化率,然后再将这些变化率积攒起来。
证明如下,
利用变上限积分作为桥梁,巧妙规避了直接用定义进行极限 $\Delta y \to 0$ 逼近的繁琐过程。
证明步骤与逻辑链条
第一步:利用微积分基本定理进行函数重构
因为 $f_y(x, y)$连续,根据微积分基本定理,我们可以把原函数$f(x, y)$表达为它的偏导数在区间$[c, y]$ 上的积分加上一个初值。即:
$$ f(x, y) = \int_{c}^{y} f_y(x, s) \, ds + f(x, c) $$
注:这里引入了辅助变量 $s$作为积分哑元,而$y$成为了上限。为了方便理解,可以将其类比为一元微积分中的$F(x) = \int_a^x F’(t)dt + F(a)$。
第二步:将重构后的表达式代入 $h(y)$
我们将上述 $f(x, y)$的积分表达式代入原函数$h(y) = \int_{a}^{b} f(x, y) , dx$ 中:
$$ h(y) = \int_{a}^{b} \left( \int_{c}^{y} f_y(x, s) \, ds + f(x, c) \right) dx $$
第三步:线性拆分积分项
利用积分的线性性质,将内部的加法拆开为两个独立的积分:
$$ h(y) = \int_{a}^{b} \left( \int_{c}^{y} f_y(x, s) \, ds \right) dx + \int_{a}^{b} f(x, c) \, dx $$
第四步:运用第一部分的“积分顺序交换定理”
仔细观察第一项 $\int_{a}^{b} \left( \int_{c}^{y} f_y(x, s) , ds \right) dx$。由于 $f_y$的连续性,它完全符合我们在第一部分论证的交换律。我们将$x$和$s$ 的积分顺序进行对调:
$$ h(y) = \int_{c}^{y} \left( \int_{a}^{b} f_y(x, s) \, dx \right) ds + \int_{a}^{b} f(x, c) \, dx $$
第五步:两边对 $y$ 求导
现在,我们对等式两边的变量 $y$ 进行求导:
$$ \frac{d}{dy} h(y) = \frac{d}{dy} \left[ \int_{c}^{y} \left( \int_{a}^{b} f_y(x, s) \, dx \right) ds \right] + \frac{d}{dy} \left[ \int_{a}^{b} f(x, c) \, dx \right] $$
我们来逐项分析右边的导数:
对于第二项 $\int_{a}^{b} f(x, c) , dx$,由于积分限 $a, b$以及函数内部的$c$全都是常数,因此该积分项关于$y$ 而言是一个纯粹的常数,其导数直接归零:$\frac{d}{dy}[\text{常数}] = 0$。
对于第一项,它完美契合变上限积分求导公式(即板书最右下角写下的提示:$\left(\int_a^x f(t)dt\right)’ = f(x)$)。当外层的 $\frac{d}{dy}$遇到以$y$为上限的积分号$\int_{c}^{y}$时,两者相互抵消,内部被积函数中的$s$被自动替换为$y$。
由此,我们最终优雅地落地:
$$ h'(y) = \int_{a}^{b} f_y(x, y) \, dx $$
即:
$$ \frac{d}{dy} \left( \int_{a}^{b} f(x, y) \, dx \right) = \int_{a}^{b} \frac{\partial}{\partial y} f(x, y) \, dx $$
证毕。
例1:巧妙构造二元积分交换顺序
1. 问题重现
求定积分:
$$ \int_{0}^{1} \frac{x^2 - x}{\ln x} \, dx $$
2. 步骤动机与构造思路
直接求解该积分的困难在于分母上的 $\ln x$。在求导时,我们知道对幂函数 $x^y$关于$y$求导会产生$\ln x$(即 $\frac{\partial}{\partial y}(x^y) = x^y \ln x$)。反过来,如果我们能把 $\frac{x^2 - x}{\ln x}$看作是某个函数对$y$积分后的结果,就可以将$\ln x$ 消去。
因此,我们的动机是:利用微积分基本定理,将分子分母的组合“还原”为一个关于新变量 $y$ 的积分,从而将一元积分扩展为二元积分,再通过交换积分顺序完成化简。
3. 完整推导过程
第一步:无中生有,将一元函数转化为变上限积分
观察分子 $x^2 - x$,它可以看作是 $x^y$在$y=1$到$y=2$ 处的差值。利用微积分基本定理:
$$ \frac{x^2 - x}{\ln x} = \frac{1}{\ln x} \left[ x^y \right]_{y=1}^{y=2} = \frac{1}{\ln x} \int_{1}^{2} \frac{\partial}{\partial y}(x^y) \, dy = \frac{1}{\ln x} \int_{1}^{2} x^y \ln x \, dy $$
由于 $\ln x$与积分变量$y$无关,可以消去分母的$\ln x$:
$$ \frac{x^2 - x}{\ln x} = \int_{1}^{2} x^y \, dy $$
第二步:代入原积分,构造二元重积分
将上式放回原积分中,得到一个累次积分:
$$ \int_{0}^{1} \frac{x^2 - x}{\ln x} \, dx = \int_{0}^{1} \left( \int_{1}^{2} x^y \, dy \right) dx $$
第三步:交换积分顺序(核心步骤)
由于被积函数 $f(x,y) = x^y$在区域$[0, 1] \times [1, 2]$上是连续的,满足积分交换律。我们将先$y$后$x$的积分顺序改为先$x$后$y$:
$$ = \int_{1}^{2} \left( \int_{0}^{1} x^y \, dx \right) dy $$
第四步:先对 $x$ 进行积分
此时对 $x$积分时,$y$ 被视为常数。这是一个简单的幂函数积分:
$$ \int_{0}^{1} x^y \, dx = \left[ \frac{1}{y+1} x^{y+1} \right]_{x=0}^{x=1} = \frac{1}{y+1} $$
第五步:最后对 $y$ 进行积分
将结果代回外层积分:
$$ = \int_{1}^{2} \frac{1}{y+1} \, dy = \left[ \ln(y+1) \right]_{1}^{2} = \ln 3 - \ln 2 = \ln \frac{3}{2} $$
最终答案: $\ln \frac{3}{2}$
例2:利用积分符号内求导求解参数积分(Poisson积分变体)
1. 问题重现
设含参变量积分:
$$ I(r) = \int_{0}^{\pi} \ln(1 - 2r\cos x + r^2) \, dx $$
求当 $r=1$时的积分值$I(1)$。
2. 步骤动机与构造思路
直接对该式关于 $x$积分极其困难。由于式中包含一个显式的参数$r$,如果我们对参数 $r$ 求导,利用莱布尼茨法则将求导符号穿透到积分号内部,对数的导数会变成有理分式,或许能够大大简化被积函数。
因此,我们的动机是:先求导函数 $I’(r)$的值,通过观察导数的行为来反推原函数$I(r)$ 的结构。
3. 完整推导过程
第一步:在积分号内关于参数 $r$ 求导
假定 $(x, r) \in [0, \pi] \times [0, c]$(其中$c < 1$)。由莱布尼茨公式:
$$ I'(r) = \int_{0}^{\pi} \frac{\partial}{\partial r} \ln(1 - 2r\cos x + r^2) \, dx = \int_{0}^{\pi} \frac{2r - 2\cos x}{1 - 2r\cos x + r^2 } \, dx $$
第二步:计算导数积分(寻找 $I’(r)$ 的值)
1. 拆分积分项与化简动机
为了让被积函数的形式更易于处理,我们先把分子稍微凑成与分母相关的结构:
$$ 2r - 2\cos x = \frac{1}{r}(2r^2 - 2r\cos x) = \frac{1}{r}(1 - 2r\cos x + r^2 + r^2 - 1) $$
这样拆分后,原积分可以拆成两部分:
$$ I'(r) = \frac{1}{r} \int_{0}^{\pi} 1 \, dx + \frac{r^2 - 1}{r} \int_{0}^{\pi} \frac{1}{1 - 2r\cos x + r^2} \, dx $$
$$ I'(r) = \frac{\pi}{r} + \frac{r^2 - 1}{r} \int_{0}^{\pi} \frac{1}{1 - 2r\cos x + r^2} \, dx $$
现在的核心任务,就是解决右边这个典型的三角有理积分:
$$ J = \int_{0}^{\pi} \frac{1}{1 - 2r\cos x + r^2} \, dx $$
2. 运用万能公式求解 $J$
第一步:引入代换
设 $t = \tan \frac{x}{2}$。
当 $x$从$0$变到$\pi$时,$t$从$0$变到$+\infty$。
由三角公式可知:
$$ \cos x = \frac{1 - t^2}{1 + t^2}, \quad dx = \frac{2}{1 + t^2} \, dt $$
第二步:代入积分式
将上述代换放进积分 $J$ 中:
$$ J = \int_{0}^{+\infty} \frac{1}{1 - 2r\left(\frac{1 - t^2}{1 + t^2}\right) + r^2} \cdot \frac{2}{1 + t^2} \, dt $$
分子分母同乘以 $(1 + t^2)$ 以消除繁分式:
$$ J = \int_{0}^{+\infty} \frac{2}{(1 + r^2)(1 + t^2) - 2r(1 - t^2)} \, dt $$
将分母按照 $t$ 的幂次进行合并展开:
$$ \text{分母} = (1 + r^2 + 2r)t^2 + (1 + r^2 - 2r) = (1 + r)^2 t^2 + (1 - r)^2 $$
所以积分化为:
$$ J = \int_{0}^{+\infty} \frac{2}{(1 + r^2 + 2r)t^2 + (1 - r)^2} \, dt = \int_{0}^{+\infty} \frac{2}{(1 + r)^2 t^2 + (1 - r)^2} \, dt $$
第三步:提取系数并使用标准积分公式
这是一个标准的反正切($\arctan$)积分形式。为了套用 $\int \frac{1}{a^2 u^2 + b^2}du = \frac{1}{ab}\arctan(\frac{au}{b})$,我们对应找出系数:
这里 $a = 1 + r$, $b = 1 - r$(因为 $r \in [0, 1)$,所以 $1 - r > 0$)。
$$ \begin{aligned} J &= 2 \cdot \left[ \frac{1}{(1 + r)(1 - r)} \arctan\left( \frac{1 + r}{1 - r} t \right) \right]_{0}^{+\infty} \\ &= \frac{2}{1 - r^2} \left( \lim_{t \to +\infty} \arctan\left( \frac{1 + r}{1 - r} t \right) - \arctan(0) \right) \end{aligned} $$
当 $t \to +\infty$时,由于$\frac{1 + r}{1 - r} > 0$,括号内部趋于 $+\infty$,因此 $\arctan(+\infty) = \frac{\pi}{2}$。
$$ J = \frac{2}{1 - r^2} \cdot \left( \frac{\pi}{2} - 0 \right) = \frac{\pi}{1 - r^2} $$
3. 送回原式,见证奇迹的消除
现在我们将计算出的 $J = \frac{\pi}{1 - r^2}$代回最初的$I’(r)$ 表达式中:
$$ \begin{aligned} I'(r) &= \frac{\pi}{r} + \frac{r^2 - 1}{r} \cdot J \\ &= \frac{\pi}{r} + \frac{r^2 - 1}{r} \cdot \left( \frac{\pi}{1 - r^2} \right) \end{aligned} $$
注意看第二项的系数, $\frac{r^2 - 1}{1 - r^2} = -1$,因此:
$$ I'(r) = \frac{\pi}{r} - \frac{\pi}{r} = 0 $$
结论:经过严密的代数运算,我们消去了所有的三角函数,最终证明了在区间 $r \in (0, 1)$内,导数$I’(r)$ 确实毫无悬念地恒等于 0。
$$ I'(r) \equiv 0, \quad r \in [0, 1) $$
(动机解释:导数恒为 0 意味着函数 $I(r)$在该区间内是一个常数函数,不随$r$ 的变化而变化。)
第三步:确定常数的值(利用特殊值法)
既然 $I(r) \equiv I(0)$对所有$r \in [0, 1)$都成立,我们只需要把$r=0$ 代入原积分式来锁定这个常数:
$$ I(0) = \int_{0}^{\pi} \ln(1 - 0 + 0) \, dx = \int_{0}^{\pi} \ln(1) \, dx = \int_{0}^{\pi} 0 \, dx = 0 $$
由此得出:
$$ I(r) \equiv 0, \quad \forall r \in [0, 1) $$
但是这并不能直接推到 $I(1)$ ,因为此时对应了瑕点,具体就需要研究带参数的瑕积分了。
含参变量广义积分:一致收敛性与判别法
一、 认知桥梁:积分与级数的平行宇宙
运用平移类比思想,理解含参变量广义积分的钥匙,就藏在函数项级数里。
| 概念维度 | 函数项级数 | 含参变量广义积分 |
|---|---|---|
| 局部截断 | 部分和: $S_n(y) = \sum_{k=1}^{n} a_k(y)$ | 变上限积分:$S_A(y) = \int_{a}^{A} f(x, y) , dx$ |
| 极限逼近 | 令项数无穷: $\lim_{n \to \infty} S_n(y) = S(y)$ | 令上限无穷:$\lim_{A \to +\infty} S_A(y) = S(y)$ |
构造动机:
既然部分和 $S_n(y)$在$n \to \infty$时有“逐点收敛”与“一致收敛”之分,那么当截断上限$A \to +\infty$时,截断积分$S_A(y)$逼近理想目标$S(y)$ 的速度同样存在分化。为了让积分和导数算子在无穷区间上也能无伤穿透,我们必须精确定义什么是“一致收敛”。
二、 严密数学定义:$\varepsilon-A$ 语言
1. 定义描述
设含参变量广义积分 $\int_{a}^{+\infty} f(x, y) , dx$在区间$y \in Y$上逐点收敛于$S(y)$。
若对于任意给定的 $\varepsilon > 0$,都存在一个只与 $\varepsilon$有关、而与$y$无关的常数$A_0 \ge a$,使得当积分上限 $A > A_0$时,对于所有$y \in Y$ 恒有:
$$ \left| \int_{a}^{A} f(x, y) \, dx - S(y) \right| \le \varepsilon \quad (\text{或记作 } \left| \int_{A}^{+\infty} f(x, y) \, dx \right| \le \varepsilon) $$
则称该广义积分在区间 $Y$上一致收敛(常用双箭头$\rightrightarrows$ 符号表示),记作:
$$ \int_{a}^{+\infty} f(x, y) \, dx \rightrightarrows S(y) \quad (A \to +\infty, y \in Y) $$
2. 动机与核心痛点
逐点收敛(弱控制):针对每个不同的 $y$,达到逼近精度所需的截断点 $A$是乱跳的。如果某个$y$需要$A=100$,而另一个 $y$需要$A=10^8$,我们就无法在宏观上对整体区域进行统一控制。
一致收敛(强控制):找到了一个“全场通用的保底上限 $A_0$”。只要截断位置超过 $A_0$,不管变量 $y$在集合$Y$里怎么变,误差都会被死死压在$\varepsilon$ 之内。
三、 魏尔斯特拉斯判别法(W-判别法 / M-判别法)
因为直接用 $\varepsilon-A$定义去证一致收敛需要先求出复杂的$S(y)$,这通常很难办到。我们需要一个不需要知道极限结果、直接看被积函数就能做判定的方法。
1. 定理内容(Weierstrass M-test 积分版)
设 $f(x, y)$定义在$[a, +\infty) \times Y$上。如果存在一个与参数$y$无关的非负函数$\varphi(x)$,满足:
- 强压制(控制性): $\forall x \in [a, +\infty), \forall y \in Y$,恒有:
$$ |f(x, y)| \le \varphi(x) $$
- 基石收敛(可积性):一元广义积分 $\int_{a}^{+\infty} \varphi(x) , dx$ 收敛。
则含参变量广义积分 $\int_{a}^{+\infty} f(x, y) , dx$在区间$Y$ 上绝对且一致收敛。
2. 推导证明
步骤一:写出 Cauchy 一致收敛准则的形式
广义积分一致收敛,等价于:对于任意 $\varepsilon > 0$,存在 $A_0$,当任意两个截断点 $B > A > A_0$ 时,对其间的“尾巴积分”能实现统一下界控制:
$$ \left| \int_{A}^{B} f(x, y) \, dx \right| \le \varepsilon \quad (\forall y \in Y) $$
步骤二:利用绝对值不等式进行放大
我们去考察这个“尾巴积分”的绝对值,利用积分的三角不等式,将绝对值符号拉进积分号内部:
$$ \left| \int_{A}^{B} f(x, y) \, dx \right| \le \int_{A}^{B} |f(x, y)| \, dx $$
步骤三:代入强控制函数 $\varphi(x)$
由于已知 $|f(x, y)| \le \varphi(x)$,我们可以将整个积分进一步放大:
$$ \int_{A}^{B} |f(x, y)| \, dx \le \int_{A}^{B} \varphi(x) \, dx $$
步骤四:借力打力,完成证明
因为 $\int_{a}^{+\infty} \varphi(x) , dx$是一个已经确定收敛的普通一元积分,根据一元积分的柯西准则,当$A, B$足够大(大于某个$A_0$)时,它的尾巴积分必然可以任意小:
$$ \int_{A}^{B} \varphi(x) \, dx \le \varepsilon $$
串联整个不等式链条,我们得到:
$$ \left| \int_{A}^{B} f(x, y) \, dx \right| \le \int_{A}^{B} \varphi(x) \, dx \le \varepsilon \quad (\forall y \in Y) $$
这完美契合了柯西一致收敛准则。证毕。
例:$\int_0^{+\infty} \frac{\sin(ax)}{x} \mathrm{d}x$为了看清一致收敛在哪里会失效,考察最经典的震荡积分,其中参数$a > 0$且$a \in (0, +\infty)$。
虽然对任何固定的 $a>0$,通过换元 $u = ax$,该积分都能收敛到狄利克雷积分的确定值 $\frac{\pi}{2}$,但当 $a$逼近于$0$ 时,其收敛速度发生了毁灭性的拖延。我们利用柯西准则的否定形式来透视这种坍塌。考察余项:
$$ \left|\int_A^{+\infty} \frac{\sin(ax)}{x} \mathrm{d}x\right| = \left|\int_{aA}^{+\infty} \frac{\sin u}{u} \mathrm{d}u\right| $$
这里的危机在于,无论我们把截断点 $A$推得多么远,只要参数$a$足够小,下限$aA$ 就可以重新缩回原点附近。
如果我们在 $A$游走时,恶意地让参数$a$联动变化,令$a = \frac{1}{A}$(显然对于任何大的 $A$,该 $a$都在定义域$(0, +\infty)$ 内),那么上式退化为:
$$ \left|\int_1^{+\infty} \frac{\sin u}{u} \mathrm{d}u\right| = c > 0 $$
这意味着残差永远无法被一致地压低到任意小的 $\varepsilon$。因此,该积分在 $(0, +\infty)$ 上不一致收敛。
参数区间的裁剪与精细化推演:以 $\int_0^{+\infty} t e^{-t^2 x^2} \mathrm{d}x$ 为例
参数所在的集合 $Y$的物理边界,直接决定了一致收敛性的存亡。我们通过对参数$t$ 的空间进行分层剖析,来展示控制流在不同环境下的行为。
1. 远离零点的闭区间 $t \in [c, d] \quad (c > 0)$在这个被硬性隔离在零点之外的区间里,原函数的增长被两头堵死。当$x$很大时,指数部分的衰减速度由最小的$t$(即 $c$)决定,而系数由最大的 $t$(即 $d$)决定:
$$ t e^{-t^2 x^2} \le d e^{-c^2 x^2} = \varphi(x) $$
由于 $\int_0^{+\infty} d e^{-c^2 x^2} \mathrm{d}x$ 是一个收敛的高斯积分,通过 M-判别法,我们可以瞬间断定积分在此区间内一致收敛。
2. 半无限区间 $t \in [c, +\infty) \quad (c > 0)$当参数被允许拉伸至$+\infty$时,由于系数带有$t$,M-判别法的放大策略失效了(因为无法找到常数 $d$封顶)。此时我们必须回归到残差的直接估计。通过换元$s = tx$ ($\mathrm{d}s = t\mathrm{d}x$):
$$ \left|\int_A^{+\infty} t e^{-t^2 x^2} \mathrm{d}x\right| = \left|\int_{tA}^{+\infty} e^{-s^2} \mathrm{d}s\right| $$
注意到,当 $t \ge c$ 时,积分下限被强行推远:$tA \ge cA$。因此:
$$ \left|\int_{tA}^{+\infty} e^{-s^2} \mathrm{d}s\right| \le \left|\int_{cA}^{+\infty} e^{-s^2} \mathrm{d}s\right| $$
右侧的积分完全独立于 $t$,且随着 $A \to +\infty$必然趋于$0$。因此,只要令 $A \ge \frac{N_\varepsilon}{c}$,就能保证残差小于 $\varepsilon$。积分在 $[c, +\infty)$ 上一致收敛。
3. 包含零点的无形深渊 $t \in [0, +\infty)$如果将区间延伸至触碰零点,平衡再次破裂。直观上看,当$t \to 0$时,整个被积函数似乎要坍塌为$0$,但只要 $t \neq 0$,它在无穷远处的积分值通过换元永远是:
$$ \int_0^{+\infty} t e^{-t^2 x^2} \mathrm{d}x = \int_0^{+\infty} e^{-s^2} \mathrm{d}s = \frac{\sqrt{\pi}}{2} $$
然而,在孤立点 $t=0$处,积分值却暴跌为$0$。这种极限积分值的不连续性,已经从侧面宣告了一致收敛的破产。
若用柯西准则严格审视:在残差 $\int_A^{+\infty} t e^{-t^2 x^2} \mathrm{d}x = \int_{tA}^{+\infty} e^{-s^2} \mathrm{d}s$中,如果让$t$随着$A$的变大而联动萎缩,取$t = \frac{1}{A} \in [0, +\infty)$,则残差恒为常数 $\int_1^{+\infty} e^{-s^2} \mathrm{d}s > 0$。全局控制链断裂,因而在全区间 $[0, +\infty)$ 上不一致收敛。
当 Weierstrass M-判别法因为被积函数的强烈震荡(正负相消)而无能为力时,我们需要更精细的工具来处理形如 $\int_a^{+\infty} f(x,y)g(x,y) \mathrm{d}x$ 的乘积型含参量广义积分。
在数学分析中,处理这类问题的核心思想是将单变量积分的经典判别法(Dirichlet 和 Abel 判别法)提升到“参数一致”的高度。
四、一致收敛的震荡控制工具
为了保证积分在参数集 $Y$上整齐划一地收敛,我们需要对两个因子$f(x,y)$和$g(x,y)$的行为做出非对称的约束。这两个定理的共同前提是:对于任意固定的$y \in Y$,$f(x,y)$关于$x$ 必须是单调的。
1. Dirichlet 判别法(一致版)
当积分的其中一部分具有良好的震荡抵消性,而另一部分均匀地趋于零时使用。
若满足以下两个条件:
- $f(x,y)$关于$x$单调,且当$x \to +\infty$时,$f(x,y) \to 0$对$y \in Y$ 一致成立。即:
$$ \lim_{x \to +\infty} \sup_{y \in Y} |f(x,y)| = 0 $$
- $g(x,y)$ 的局部积分被均匀地盖住,即其原函数一致有界:
$$ \exists M > 0, \quad \text{使得 } \left| \int_a^A g(x,y) \mathrm{d}x \right| \le M, \quad \forall A \ge a, \forall y \in Y $$
则广义积分 $\int_a^{+\infty} f(x,y)g(x,y) \mathrm{d}x$在$Y$ 上一致收敛。
2. Abel 判别法(一致版)
当其中一部分本身已经一致收敛,而另一部分均匀保持稳定(不失控)时使用。
若满足以下两个条件:
- $f(x,y)$关于$x$ 单调,且在整个参数域上一致有界:
$$ \exists M > 0, \quad \text{使得 } |f(x,y)| \le M, \quad \forall x \in [a, +\infty), \forall y \in Y $$
- 广义积分 $\int_a^{+\infty} g(x,y) \mathrm{d}x$在$Y$ 上一致收敛。
则广义积分 $\int_a^{+\infty} f(x,y)g(x,y) \mathrm{d}x$在$Y$ 上一致收敛。
经典案例精析:$\int_0^{+\infty} e^{-tx} \frac{\sin x}{x} \mathrm{d}x \quad (t \in [0, +\infty))$这个积分完美展示了如何利用上述定理在边界上完成精细的解析控制。我们需要证明它在包含零点的闭半轴$t \in [0, +\infty)$ 上是一致收敛的。
由于 $x \to 0$时$\frac{\sin x}{x} \to 1$,原点并非瑕点。我们只需关注 $x \to +\infty$ 处的行为。将其拆解为两部分:
$$ f(x,t) = e^{-tx}, \quad g(x,t) = \frac{\sin x}{x} $$
视角一:尝试直接用 Dirichlet 判别法?(遭遇挫败)
如果令 $f(x,t) = e^{-tx}$,虽然它关于 $x$单调递减,但当$t \to 0$时,$e^{-tx} \to 1$。这意味着当 $t$漂移到$0$附近时,它在无穷远处趋于$0$ 的速度可以任意慢。也就是说,$f(x,t) \to 0$对$t \in [0, +\infty)$ 不是一致的。
因此,直接对整个积分在 $[0, +\infty)$ 上套用 Dirichlet 判别法宣告失败。
视角二:重新拆分因子与 Abel 判别法的巧妙介入
既然直接控制衰减速度行不通,我们可以重新分配因子的角色,利用 Abel 判别法的“一致有界 + 一致收敛”的逻辑:
审视第一部分 $f(x,t) = e^{-tx}$:
对于任何 $t \ge 0$和$x \ge 0$,指数函数显然满足:
$$ |e^{-tx}| \le 1 $$
这说明 $f(x,t)$关于$x$单调且在$t \in [0, +\infty)$ 上一致有界。
审视第二部分 $g(x,t) = \frac{\sin x}{x}$:
这个部分甚至不包含参数 $t$。由单变量积分的知识可知,狄利克雷积分 $\int_0^{+\infty} \frac{\sin x}{x} \mathrm{d}x$ 是收敛的。因为参数根本不参与这一部分,所以它退化为平庸的一致收敛。
结论:根据 Abel 判别法,一致有界因子 $e^{-tx}$与一致收敛积分$\int_0^{+\infty} \frac{\sin x}{x} \mathrm{d}x$的组合,完美锁定了原积分$\int_0^{+\infty} e^{-tx} \frac{\sin x}{x} \mathrm{d}x$在$t \in [0, +\infty)$ 上的一致收敛性。
应用:求导工具的解锁与求值
一致收敛性绝不是纯粹的理论空谈,它是我们对积分号下进行分析操作(如求导、求极限)的“通行证”。
令 $S(t) = \int_0^{+\infty} e^{-tx} \frac{\sin x}{x} \mathrm{d}x$。由于积分在 $t \in [0, +\infty)$上一致收敛,且形式上对$t$求导后满足更强的一致收敛条件(在$t \in [t_0, +\infty), t_0 > 0$ 上),我们可以合法地将导数算子穿透到积分号内部:
$$ S'(t) = \int_0^{+\infty} \frac{\partial}{\partial t} \left( e^{-tx} \frac{\sin x}{x} \right) \mathrm{d}x = \int_0^{+\infty} (-x) e^{-tx} \frac{\sin x}{x} \mathrm{d}x = -\int_0^{+\infty} e^{-tx} \sin x \mathrm{d}x $$
这是一个基础的逐部积分或复指数积分,结果为:
$$ S'(t) = -\frac{1}{1 + t^2} \quad (t > 0) $$
两边关于 $t$ 积分,得到:
$$ S(t) = -\arctan t + C $$
为了确定常数 $C$,由于积分在 $t \to +\infty$时具有良好的控制,容易看到$\lim_{t \to +\infty} S(t) = 0$。而 $\lim_{t \to +\infty} (-\arctan t) = -\frac{\pi}{2}$,从而解得 $C = \frac{\pi}{2}$。
最终我们得到:
$$ S(t) = \frac{\pi}{2} - \arctan t $$
因为我们在前面证明了积分在包含 $t=0$的闭区间上一致收敛,根据一致收敛积分的连续性定理,我们可以放心地令$t \to 0^+$ 取极限:
$$ \int_0^{+\infty} \frac{\sin x}{x} \mathrm{d}x = S(0) = \frac{\pi}{2} $$
通过一致收敛建立的桥梁,原本难以直接计算的震荡积分问题迎刃而解。
在掌握了含参量广义积分的交换积分次序定理后,我们可以精妙地解决一类直接计算几乎不可能、但引入一个参数“维度”后能瞬间降维打击的经典硬核积分。
下面我们运用积分号下交换积分的工具,来完整拆解并计算这个高难度积分。
经典案例:利用积分号下交换积分计算分式广义积分
核心任务
求广义积分的值:
$$ I = \int_0^{+\infty} \frac{e^{-ax^2} - e^{-bx^2}}{x^2} \mathrm{d}x \quad (a, b > 0) $$
动机与战略构想
面对这个积分,直接寻找原函数是死路一条,因为 $x^2$ 在分母上阻碍了我们利用高斯积分的性质。
然而,注意到分子 $e^{-ax^2} - e^{-bx^2}$的结构非常特殊,它完美符合微积分基本定理的逆向表达。如果我们引入一个连续变化的动态参数$t$,将这两个端点值还原为一个关于 $t$ 的导数的积分:
$$ \left. -e^{-tx^2} \right|_a^b = e^{-ax^2} - e^{-bx^2} $$
那么,利用求导可以把分母上的 $x^2$ 消去!这就是创造条件进行积分次序交换的绝佳契机。
严密推导与计算步骤
第一步:引入参数,改写为累次积分
利用微积分基本定理,将分子改写为对参数 $t$ 的积分:
$$ e^{-ax^2} - e^{-bx^2} = \int_a^b \frac{\partial}{\partial t} \left( -e^{-tx^2} \right) \mathrm{d}t = \int_a^b x^2 e^{-tx^2} \mathrm{d}t $$
将这一表达代回原积分 $I$ 中:
$$ I = \int_0^{+\infty} \frac{1}{x^2} \left( \int_a^b x^2 e^{-tx^2} \mathrm{d}t \right) \mathrm{d}x $$
消去分母中的 $x^2$,我们得到了一个极其干净的累次积分结构:
$$ I = \int_0^{+\infty} \left( \int_a^b e^{-tx^2} \mathrm{d}t \right) \mathrm{d}x $$
第二步:交换积分次序
由于当 $t \in [a, b]$且$a > 0$时,内部的广义积分$\int_0^{+\infty} e^{-tx^2} \mathrm{d}x$关于参数$t$是一致收敛的(可由 Weierstrass M-判别法用$e^{-ax^2}$ 作为控制函数轻松证明)。
符合可积性定理的全部安全边界条件,我们果断交换 $x$和$t$ 的积分次序:
$$ I = \int_a^b \left( \int_0^{+\infty} e^{-tx^2} \mathrm{d}x \right) \mathrm{d}t $$
第三步:求解内层高斯积分
现在,内层积分变成了标准的标准高斯积分形式。为了精确求解,对内层进行变量代换。
令 $s = \sqrt{t}x$,则 $\mathrm{d}x = \frac{1}{\sqrt{t}}\mathrm{d}s$,积分限保持 $[0, +\infty)$ 不变:
$$ \int_0^{+\infty} e^{-tx^2} \mathrm{d}x = \int_0^{+\infty} e^{-s^2} \frac{1}{\sqrt{t}} \mathrm{d}s = \frac{1}{\sqrt{t}} \int_0^{+\infty} e^{-s^2} \mathrm{d}s $$
已知经典高斯积分值 $\int_0^{+\infty} e^{-s^2} \mathrm{d}s = \frac{\sqrt{\pi}}{2}$,故内层积分结果为:
$$ \frac{\sqrt{\pi}}{2} \cdot \frac{1}{\sqrt{t}} $$
第四步:外层参数积分与最终锁定
将内层计算结果代回外层,对参数 $t$在$[a, b]$ 上进行常规一元积分:
$$ I = \int_a^b \frac{\sqrt{\pi}}{2} \frac{1}{\sqrt{t}} \mathrm{d}t = \frac{\sqrt{\pi}}{2} \int_a^b t^{-\frac{1}{2}} \mathrm{d}t $$
利用幂函数原函数公式进行计算:
$$ I = \frac{\sqrt{\pi}}{2} \left[ 2\sqrt{t} \right]_a^b = \frac{\sqrt{\pi}}{2} \cdot 2(\sqrt{b} - \sqrt{a}) = \sqrt{\pi}(\sqrt{b} - \sqrt{a}) $$
通过引入一维虚拟参数空间 $t$,原本卡死在 $x^2$ 分母上的代数困局,在交换积分次序后化为了平庸的高斯积分与幂函数积分之积。
最终答案极为优美:
$$ \int_0^{+\infty} \frac{e^{-ax^2} - e^{-bx^2}}{x^2} \mathrm{d}x = \sqrt{\pi}(\sqrt{b} - \sqrt{a}) $$
在完成了关于可积性的探索后,我们再次回到最强大的解析工具——积分号下求导(可微性定理)。
下面我们通过一个极具技巧性的含参量广义积分,完整展示如何通过积分号下求导、三角换元以及有理化代换,将其层层剥离并最终锁定。
核心任务
求解含参量广义积分:
$$ S(t) = \int_0^1 \frac{\arctan(tx)}{x \sqrt{1-x^2}} \mathrm{d}x \quad (t \in [0, +\infty)) $$
严密推导与计算步骤
第一步:导数算子的穿透(积分号下求导)
注意到当 $x \to 0$时,利用泰勒展开$\arctan(tx) \sim tx$,被积函数趋于 $\frac{t}{\sqrt{1-x^2}}$,因此 $x=0$并非瑕点;而$x=1$ 是明显的被积函数趋于无穷的瑕点。
为了消除复杂的 $\arctan$结构,我们对参数$t$求导。根据可微性定理,假设求导后的积分一致收敛(后续步骤将自动验证其在$t \in [0, +\infty)$ 上的良好性质),将导数算子穿透到积分内部:
$$ S'(t) = \int_0^1 \frac{\partial}{\partial t} \left[ \frac{\arctan(tx)}{x \sqrt{1-x^2}} \right] \mathrm{d}x = \int_0^1 \frac{1}{x \sqrt{1-x^2}} \cdot \frac{x}{1+(tx)^2} \mathrm{d}x $$
消去分子分母中的 $x$,我们得到了一个纯粹的代数有理根式积分:
$$ S'(t) = \int_0^1 \frac{1}{\sqrt{1-x^2}(1+t^2 x^2)} \mathrm{d}x $$
第二步:经典三角换元
面对分母上的 $\sqrt{1-x^2}$,最自然的动机是利用三角函数将其化简。
令 $x = \sin\theta$,则 $\mathrm{d}x = \cos\theta \mathrm{d}\theta$。当 $x$从$0$变到$1$ 时,$\theta$的积分区间相应地变为$\left[0, \frac{\pi}{2}\right]$:
$$ S'(t) = \int_0^{\frac{\pi}{2}} \frac{1}{\cos\theta (1+t^2 \sin^2\theta)} \cos\theta \mathrm{d}\theta = \int_0^{\frac{\pi}{2}} \frac{1}{1+t^2 \sin^2\theta} \mathrm{d}\theta $$
第三步:万能代换的变体(有理化)
为了求解关于 $\theta$ 的三角有理积分,我们需要将其转化为传统的代数有理分式。
引入换元 $u = \tan\theta$。在此变换下,我们有经典的几何关系:
$$ \sin^2\theta = \frac{u^2}{1+u^2}, \quad \theta = \arctan u \implies \mathrm{d}\theta = \frac{1}{1+u^2} \mathrm{d}u $$
当 $\theta$从$0$走向$\frac{\pi}{2}$ 时,$u$从$0$飙升至$+\infty$。将这些关系代入积分式:
$$ S'(t) = \int_0^{+\infty} \frac{1}{1 + t^2 \left(\frac{u^2}{1+u^2}\right)} \cdot \frac{1}{1+u^2} \mathrm{d}u $$
通分并化简分母:
$$ S'(t) = \int_0^{+\infty} \frac{1+u^2}{(1+u^2) + t^2 u^2} \cdot \frac{1}{1+u^2} \mathrm{d}u = \int_0^{+\infty} \frac{1}{1 + (1+t^2)u^2} \mathrm{d}u $$
第四步:计算导数积分值
上述形式是一个标准的 $\arctan$ 原函数结构。为了清晰表述,我们将分母改写为标准平方和形式:
$$ S'(t) = \int_0^{+\infty} \frac{1}{1 + \left(\sqrt{1+t^2}u\right)^2} \mathrm{d}u = \left. \frac{1}{\sqrt{1+t^2}} \arctan\left(\sqrt{1+t^2}u\right) \right|_0^{+\infty} $$
代入上下限:
$$ S'(t) = \frac{1}{\sqrt{1+t^2}} \left( \frac{\pi}{2} - 0 \right) = \frac{\pi}{2} \cdot \frac{1}{\sqrt{1+t^2}} $$
(注:由于 $S’(t)$在$t \in [0, +\infty)$ 上连续且有界,其对应的含参量广义积分显然一致收敛,这反向证明了第一步求导操作的完全合法性。)
第五步:还原原积分
现在,我们得到了 $S(t)$的导数,只需对其关于$t$ 进行一次简单的一元积分即可:
$$ S(t) = \int \frac{\pi}{2} \frac{1}{\sqrt{1+t^2}} \mathrm{d}t = \frac{\pi}{2} \ln\left(t + \sqrt{1+t^2}\right) + C $$
为了确定积分常数 $C$,回归到原积分的起点。显然,当参数 $t = 0$时,分子$\arctan(0) = 0$,导致整个积分值坍塌为零:
$$ S(0) = 0 $$
将 $t=0$ 代入我们求得的含常数表达式中:
$$ S(0) = \frac{\pi}{2} \ln(0 + \sqrt{1+0}) + C = \frac{\pi}{2} \ln(1) + C = C \implies C = 0 $$
通过精妙地使用积分号下求导,我们将一个复杂的反三角根式广义积分转化为对数形式。最终答案极其优雅:
$$ \int_0^1 \frac{\arctan(tx)}{x \sqrt{1-x^2}} \mathrm{d}x = \frac{\pi}{2} \ln\left(t + \sqrt{1+t^2}\right) $$
在处理含参量积分的极限与变换时,最棘手的情形莫过于积分区间与参数区间同时拉伸至无穷远。此前我们讨论的可积性定理局限于参数 $y$在有限闭区间$[c,d]$ 上的交换。若参数域也变为无穷区间,即考察双重无穷边界下的累次积分交换:
$$ \int_c^{+\infty} \left( \int_a^{+\infty} f(x,y) \mathrm{d}x \right) \mathrm{d}y \stackrel{?}{=} \int_a^{+\infty} \left( \int_c^{+\infty} f(x,y) \mathrm{d}y \right) \mathrm{d}x $$
此时,由于双重极限过程在无穷远处的相互纠缠,仅靠普通的“一致收敛”已不足以支撑算子的无条件交换。为了防止无穷远处的非均匀坍塌,我们需要更强的分析工具。
核心定理:双重无穷区间下的积分交换定理
设 $f(x,y)$在第一象限区域$x \in [a, +\infty), y \in [c, +\infty)$ 上连续。为了安全地交换这两个无穷积分的次序,数学分析提供了两条并行的逻辑路径:局部一致收敛加绝对可积控制,或者全局绝对双重可积性(Fubini 型)。
路径一:内层一致收敛 + 外层绝对可积控制
若满足以下条件:
局部一致收敛:对任意固定的有限上界 $d > c$,积分 $\int_a^{+\infty} f(x,y) \mathrm{d}x$在参数子区间$y \in [c, d]$上一致收敛;同理,对任意固定的$b > a$, $\int_c^{+\infty} f(x,y) \mathrm{d}y$在$x \in [a, b]$ 上一致收敛。
绝对可积性约束(强控制):以下两个绝对累次积分中,至少有一个是存在且收敛的:
$$ \int_c^{+\infty} \left( \int_a^{+\infty} |f(x,y)| \mathrm{d}x \right) \mathrm{d}y \quad \text{或} \quad \int_a^{+\infty} \left( \int_c^{+\infty} |f(x,y)| \mathrm{d}y \right) \mathrm{d}x $$
则双重无穷区间的积分次序可以合法交换,即:
$$ \int_c^{+\infty} \left( \int_a^{+\infty} f(x,y) \mathrm{d}x \right) \mathrm{d}y = \int_a^{+\infty} \left( \int_c^{+\infty} f(x,y) \mathrm{d}y \right) \mathrm{d}x $$
动机透视:为什么要强调“绝对值积分存在”?
当两个区间都是无穷时,函数可能在无穷远处产生剧烈的正负交替震荡。如果只要求原积分收敛(可能是条件收敛),那么在交换次序后,震荡的相互抵消机制可能会在不同的积分路径下发生解耦,从而导致两边结果不相等,甚至一边收敛而一边发散。
引入 $|f(x,y)|$ 的绝对可积性,本质上是在空间中拉起了一面有界的“能量天花板”,从根本上扼杀了任何依靠无穷远震荡来维持收敛的弱平衡状态,为算子交换提供了坚实的置信度保护。
经典应用:概率论中高斯积分核心公式的再审视
为了看清双无穷积分交换的威力,我们可以用它来解释概率论与数理统计的核心基石——高斯积分的总能量归一化。
战略构想
我们要计算著名的拉普拉斯-高斯积分值:
$$ J = \int_0^{+\infty} e^{-x^2} \mathrm{d}x $$
常规的做法是利用二重积分的极坐标变换。而在含参量广义积分的框架下,我们可以引入一个无形的指数参数 $y$,通过构造一个二元控制流,在双重无穷积分交换中直接提取出 $J^2$。
严密推导与解析步骤
第一步:构造含有二维结构的控制函数
考虑函数 $f(x,y) = x e^{-x^2(1+y^2)}$,其定义域为 $x \in [0, +\infty), y \in [0, +\infty)$。这个函数的设计动机极其精妙:它在指数上保留了二次型的乘积结构,同时在外部保留了 Jacobi 式的因子 $x$,以便于进行换元。
我们现在对它在整个第一象限计算累次积分。
第二步:路径 $A$—— 先$y$后$x$ 积分
首先将 $x$视为常数参数,对$y$在$[0, +\infty)$ 上进行广义积分。
为了消除指数上的 $y^2$,做变量代换 $u = xy$,则 $\mathrm{d}y = \frac{1}{x} \mathrm{d}u$:
$$ \int_0^{+\infty} x e^{-x^2(1+y^2)} \mathrm{d}y = x e^{-x^2} \int_0^{+\infty} e^{-(xy)^2} \mathrm{d}y = x e^{-x^2} \int_0^{+\infty} e^{-u^2} \frac{1}{x} \mathrm{d}u $$
外部的 $x$与分母上的$x$完美对消。注意到剩下的内层积分为标准高斯积分$\int_0^{+\infty} e^{-u^2} \mathrm{d}u = J$,因此:
$$ \int_0^{+\infty} x e^{-x^2(1+y^2)} \mathrm{d}y = J e^{-x^2} $$
接着,对这一结果在外层关于 $x$从$0$到$+\infty$ 求积分:
$$ \int_0^{+\infty} \left( \int_0^{+\infty} x e^{-x^2(1+y^2)} \mathrm{d}y \right) \mathrm{d}x = \int_0^{+\infty} J e^{-x^2} \mathrm{d}x = J \cdot \int_0^{+\infty} e^{-x^2} \mathrm{d}x = J^2 $$
第三步:路径 $B$—— 先$x$后$y$ 积分
现在我们转换视角,先对 $x$ 进行积分。
注意到被积函数 $x e^{-x^2(1+y^2)}$外部的$x$恰好是内部指数关于$x$ 的导数项的常数倍。因此,内层积分可以直接凑微分求解:
$$ \int_0^{+\infty} x e^{-x^2(1+y^2)} \mathrm{d}x = \left. -\frac{1}{2(1+y^2)} e^{-x^2(1+y^2)} \right|_{x=0}^{x=+\infty} = 0 - \left( -\frac{1}{2(1+y^2)} \right) = \frac{1}{2(1+y^2)} $$
接下来,对这一结果在外层关于参数 $y$在$[0, +\infty)$ 上求积分:
$$ \int_0^{+\infty} \left( \int_0^{+\infty} x e^{-x^2(1+y^2)} \mathrm{d}x \right) \mathrm{d}y = \int_0^{+\infty} \frac{1}{2(1+y^2)} \mathrm{d}y = \left. \frac{1}{2} \arctan y \right|_0^{+\infty} = \frac{1}{2} \cdot \frac{\pi}{2} = \frac{\pi}{4} $$
第四步:交换合法性验证与最终锁定
由于被积函数 $f(x,y) = x e^{-x^2(1+y^2)}$在第一象限内非负,其原积分与其绝对值积分完全等价。路径$B$计算出的累次积分值$\frac{\pi}{4}$ 是一明确的正实数,这直接宣告了定理中绝对可积性约束条件完美成立。
因此,双无穷区间下的积分交换操作完全合法。两条路径的计算终点必须强行并轨:
$$ J^2 = \frac{\pi}{4} $$
由于高斯积分取正值,两边开根号即得:
$$ J = \int_0^{+\infty} e^{-x^2} \mathrm{d}x = \frac{\sqrt{\pi}}{2} $$
总结
通过双重无穷区间积分交换定理,我们无需借助显式的二维平面坐标变换(如极坐标系的雅可比行列式),仅凭一维含参量广义积分的代数穿透,便在逻辑的完全自洽中再次锁定了高斯积分的经典值。
在对含参量广义积分的极限、导数与积分进行了严密的分析控制之后,我们来研究两个由含参量广义积分定义的特殊函数——Gamma 函数 ($\Gamma$) 与 Beta 函数 ($B$)。
它们不仅是阶乘在实数(乃至复数)域上的解析延拓,更是连接各种硬核积分的终极纽带。
特殊函数
1. Gamma 函数:阶乘的连续化延拓
核心定义
对于参数 $\alpha > 0$,定义 Gamma 函数为以下无穷区间上的含参量广义积分:
$$ \Gamma(\alpha) = \int_0^{+\infty} x^{\alpha-1} e^{-x} \mathrm{d}x $$
收敛性简析:该积分在 $x \to 0$处(当$0 < \alpha < 1$时)有瑕点,在$x \to +\infty$处是广义积分。利用比较判别法易证,当且仅当$\alpha > 0$ 时,该积分在任何紧子区间上一致收敛,从而定义了一个连续可导的函数。
基本性质与递推关系
通过分部积分,我们可以直接建立 Gamma 函数的阶乘阶梯:
$$ \Gamma(\alpha) = \int_0^{+\infty} x^{\alpha-1} \mathrm{d}(-e^{-x}) = \left. -x^{\alpha-1}e^{-x} \right|_0^{+\infty} + (\alpha-1)\int_0^{+\infty} x^{\alpha-2}e^{-x} \mathrm{d}x $$
当 $\alpha > 1$时,前项坍坍为$0$,于是得到核心递推公式:
$$ \Gamma(\alpha) = (\alpha-1)\Gamma(\alpha-1) $$
经典离散点与特殊值
- 离散整数点:由 $\Gamma(1) = \int_0^{+\infty} e^{-x} \mathrm{d}x = 1$出发,结合递推公式,对任意正整数$n$,显然有:
$$ \Gamma(n) = (n-1)! $$
- 半整数重要特殊值:通过高斯积分换元可直接锁定 $\Gamma\left(\frac{1}{2}\right)$。令 $x = u^2$,则 $\mathrm{d}x = 2u\mathrm{d}u$:
$$ \Gamma\left(\frac{1}{2}\right) = \int_0^{+\infty} x^{-\frac{1}{1}} e^{-x} \mathrm{d}x = \int_0^{+\infty} \frac{1}{u} e^{-u^2} (2u \mathrm{d}u) = 2\int_0^{+\infty} e^{-u^2} \mathrm{d}u = \sqrt{\pi} $$
2. Beta 函数:有限区间上的幂指标组合
核心定义
对于参数 $p > 0, q > 0$,定义 Beta 函数(又称第一类欧拉积分)为有限闭区间上的含参量瑕积分:
$$ B(p, q) = \int_0^1 x^{p-1}(1-x)^{q-1} \mathrm{d}x $$
当 $p < 1$时,原点为瑕点;当$q < 1$时,划定$x = 1$为瑕点。参数约束$p > 0, q > 0$完美保证了其收敛性。由对称性换元$t = 1-x$ 易知:
$$ B(p, q) = B(q, p) $$
3. 终极纽带:Beta 函数与 Gamma 函数的互通公式
Gamma 函数与 Beta 函数看似一个在无穷区间、一个在有限区间,但它们内部的指数与幂次结构存在深层的代数同构。它们之间存在一个著名的至高核心公式:
$$ B(p, q) = \frac{\Gamma(p)\Gamma(q)}{\Gamma(p+q)} $$
动机与严密证明推导
为了看清这个公式的来源,我们需要将两个一维的 Gamma 函数相乘,转化为一个二重积分,再通过坐标变换提取出 Beta 函数的结构。
考虑两个独立的 Gamma 积分,引入变量代换以方便做平面极坐标式的处理。
令 $x = u^2$ ($\mathrm{d}x = 2u\mathrm{d}u$), $y = v^2$ ($\mathrm{d}y = 2v\mathrm{d}v$):
$$ \Gamma(p) = 2\int_0^{+\infty} u^{2p-1} e^{-u^2} \mathrm{d}u, \quad \Gamma(q) = 2\int_0^{+\infty} v^{2q-1} e^{-v^2} \mathrm{d}v $$
将两者相乘,化为第一象限上的累次积分(进而转换为二重积分):
$$ \Gamma(p)\Gamma(q) = 4 \int_0^{+\infty} \int_0^{+\infty} u^{2p-1} v^{2q-1} e^{-(u^2+v^2)} \mathrm{d}u \mathrm{d}v $$
面对 $e^{-(u^2+v^2)}$ 结构,最自然的动机是转换为极坐标系。
令 $u = r\cos\theta, v = r\sin\theta$,雅可比行列式面积元素 $\mathrm{d}u\mathrm{d}v = r\mathrm{d}r\mathrm{d}\theta$。第一象限对应的几何边界为 $r \in [0, +\infty), \theta \in \left[0, \frac{\pi}{2}\right]$:
$$ \Gamma(p)\Gamma(q) = 4 \int_0^{\frac{\pi}{2}} \int_0^{+\infty} (r\cos\theta)^{2p-1} (r\sin\theta)^{2q-1} e^{-r^2} r \mathrm{d}r \mathrm{d}\theta $$
将径向变量 $r$与角向变量$\theta$ 彻底解耦分离:
$$ \Gamma(p)\Gamma(q) = 4 \left( \int_0^{+\infty} r^{2(p+q)-1} e^{-r^2} \mathrm{d}r \right) \left( \int_0^{\frac{\pi}{2}} (\cos\theta)^{2p-1} (\sin\theta)^{2q-1} \mathrm{d}\theta \right) $$
- 审视左侧的 $r$积分:重新做换元$t = r^2$ ($\mathrm{d}t = 2r\mathrm{d}r$),它立刻回归为 Gamma 函数的标准定义:
$$ 2 \int_0^{+\infty} r^{2(p+q)-1} e^{-r^2} \mathrm{d}r = \int_0^{+\infty} t^{(p+q)-1} e^{-t} \mathrm{d}t = \Gamma(p+q) $$
- 审视右侧的 $\theta$积分:为了将其与 Beta 函数对口,我们在$B(p, q)$原始定义中做三角换元$x = \sin^2\theta$ ($\mathrm{d}x = 2\sin\theta\cos\theta\mathrm{d}\theta$):
$$ B(p, q) = \int_0^{\frac{\pi}{2}} (\sin^2\theta)^{p-1} (1-\sin^2\theta)^{q-1} \cdot 2\sin\theta\cos\theta \mathrm{d}\theta = 2\int_0^{\frac{\pi}{2}} (\sin\theta)^{2p-1} (\cos\theta)^{2q-1} \mathrm{d}\theta $$
利用对称性,这刚好等于上述解耦出的角向积分的两倍。
将这两部分拼回原式,便完成了逻辑的闭环:
$$ \Gamma(p)\Gamma(q) = \Gamma(p+q) \cdot B(p, q) \implies B(p, q) = \frac{\Gamma(p)\Gamma(q)}{\Gamma(p+q)} $$
该公式将有限区间上的强烈不可积性与无穷远处的衰减速度完美地进行了代数对冲,是整个积分变换理论中的神来之笔。